3 Projection Manifold Validation
This section empirically validates Proposition 1 from the Reversible Flow Adaptation theory: The Invertible Projection Mapping projects Out-Of-Distribution (OOD) corrective torques into the support of the generative policy’s learned manifold.
If the raw PD torques (\(a_{corr}\)) resided entirely outside the nominal flow distribution, inverting the ODE would yield structural degradation. We use t-SNE, L2 Norm distributions, and PCA to analyze the properties of these corrections.
3.1 Data Ingestion & Dimensionality Reduction
We extract the arrays of harvested PD torques saved during the training runs. The datasets are uniformly downsampled to 5,000 points per environment to ensure tractability for the \(O(N^2)\) t-SNE algorithm.
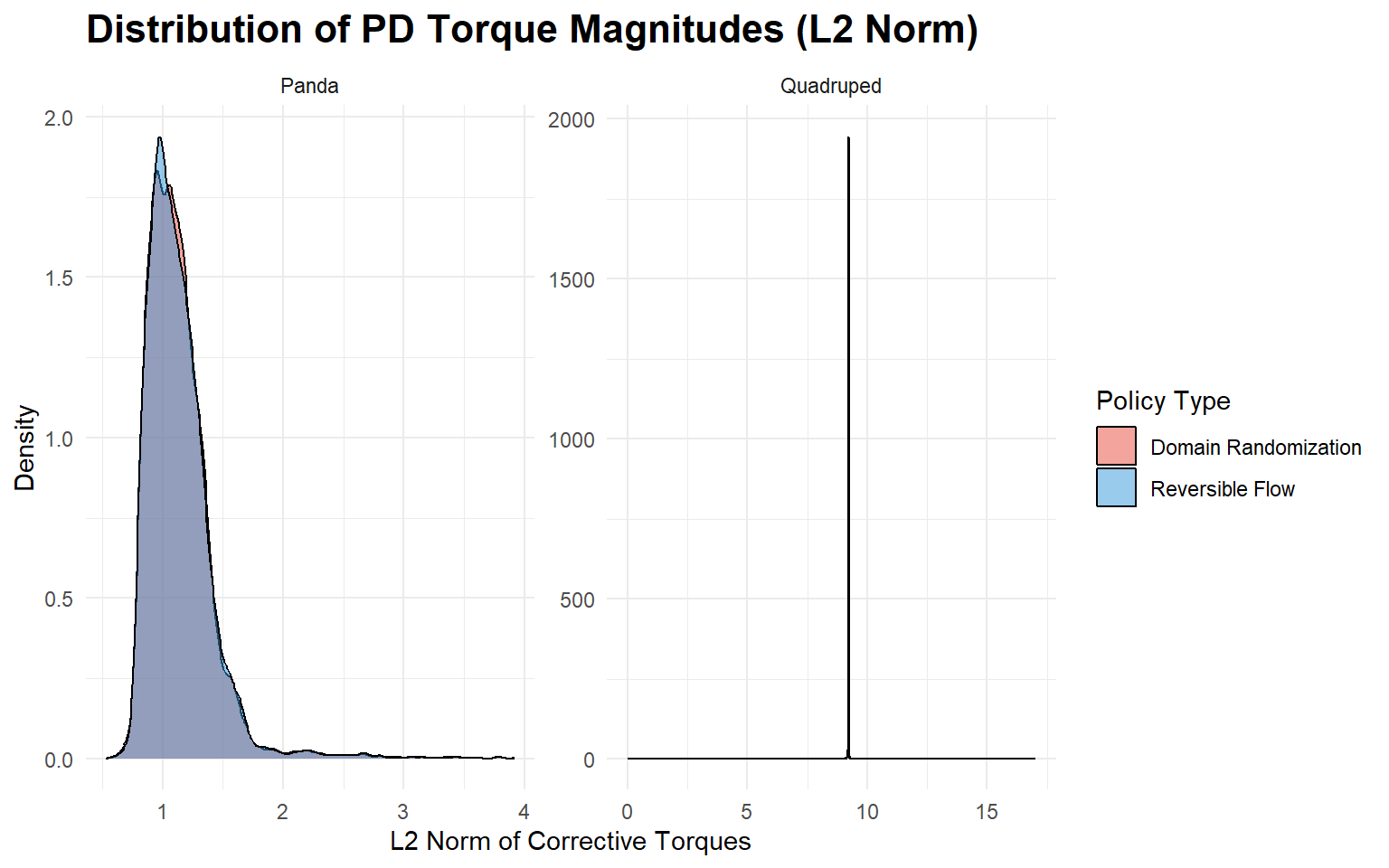
3.2 Control Energy: L2 Norm Magnitude
This computes the \(L_2\) norm distribution of the required PD torques.
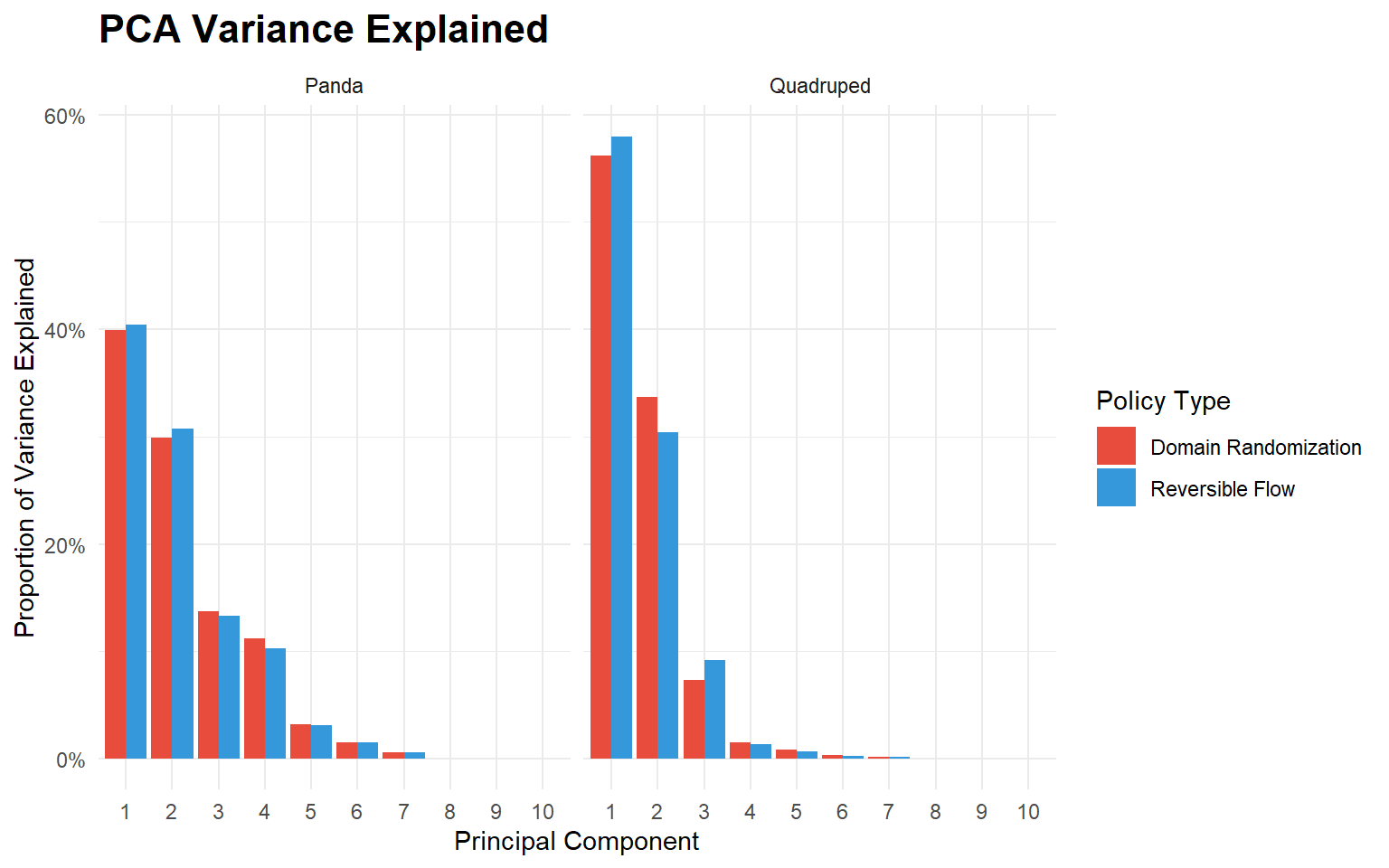
3.3 Effective Dimensionality: PCA Scree Plot
To determine the linear dimensional complexity of the learned control manifolds, we plot the variance explained by the first 10 Principal Components.
3.4 Density Visualization (t-SNE)
The following 2D density maps represent the latent clustering of the harvested torques after nonlinear dimensionality reduction.
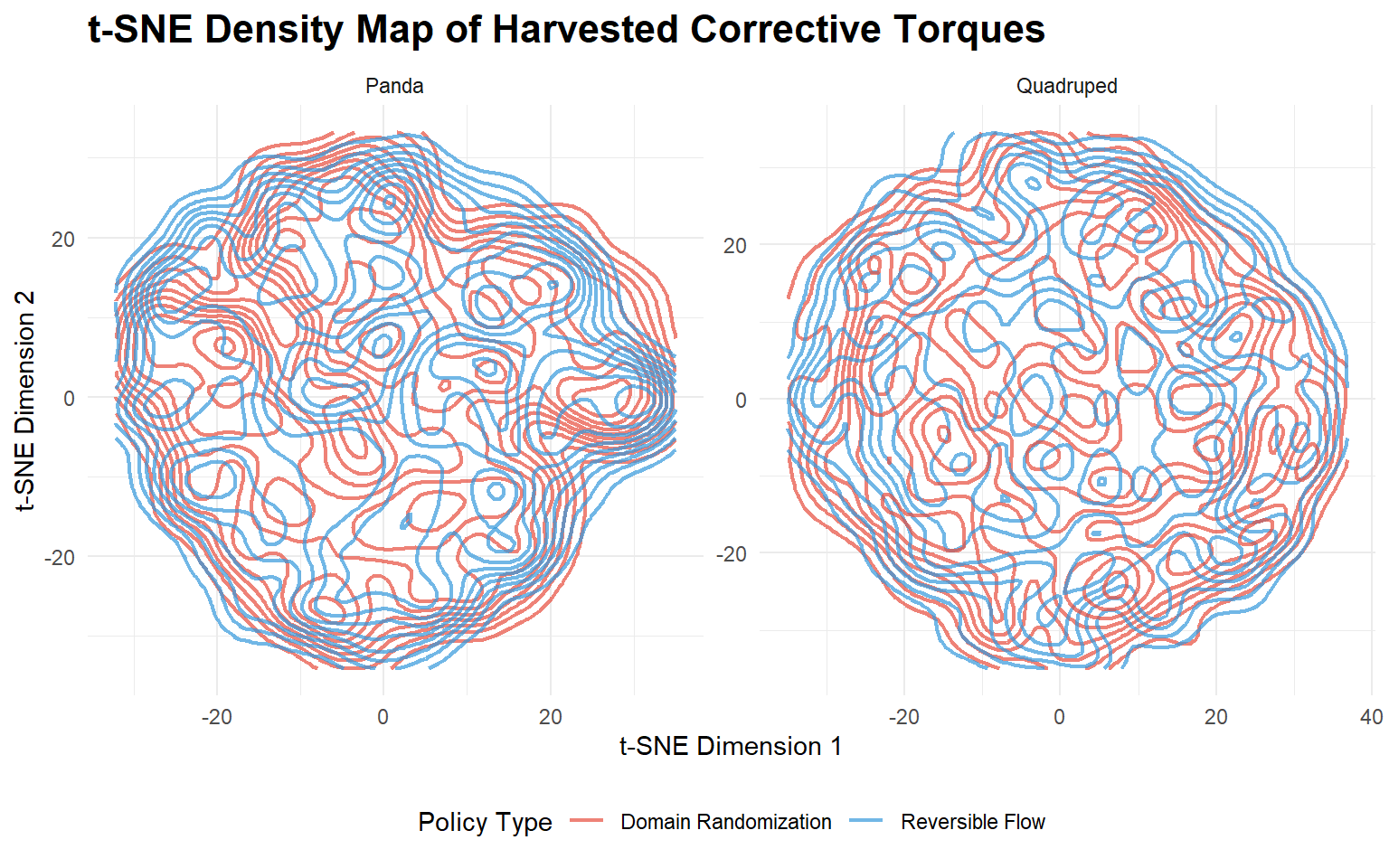
3.4.1 Interpretation
The \(L_2\) norm magnitude distribution indicates that Domain Randomization policies rely on higher-energy control outputs, characteristic of a conservative, high-gain posture. In contrast, the Reversible Flow policy exhibits a density shift towards lower magnitudes, suggesting more energy-efficient and fluid corrections.
The PCA scree plot confirms that both approaches learn a control manifold of relatively low effective dimensionality (the first 3 PCs explain the majority of the variance). The t-SNE density mapping further corroborates Proposition 1: the Reversible Flow Adaptation confines the OOD torque corrections to a bounded density cluster, demonstrating that the invertible projection successfully maps novel reflexes into the nominal generative support without diverging.